NEWS
PORTFOLIO NEWS
MUJIN:東京大学発ベンチャー の株式会社MUJIN、75百万円のシリーズA資金を東京大学エッジキャピタル(UTEC)から調達

2012年9月19日
シリーズA資金の調達
産業用ロボット向けのソフトウェアを開発販売する株式会社MUJIN(本社:東京都文京区、代表取締役:滝野一征、以下「MUJIN」)は、この度ベンチャーキャピタルの株式会社東京大学エッジキャピタル(本社:東京都文京区、代表取締役社長:郷治友孝、以下「UTEC」)からシリーズA資金として75百万円の増資を実施致しました。MUJINでは、今回の調達資金を用いて、産業用ロボットの動作計画と配置最適化を行うソフトウェア「MUJINコントローラー」の開発を進め、本革新技術の市場展開を進めて参ります。
MUJINのMISSIONと創業メンバー
MUJINは、ソフトウェアの力によって、世界中の産業用ロボットをより簡単に、そしてより便利に使えるようにする事で、世界中の人々の生活と生産性を向上することをミッションとする、ロボットのソフトウァエの研究で世界的に有名な東京大学大学院情報理工学系研究科情報システム工学研究室(JSK)研究員の出杏光 魯仙(デアンコウ ロセン/Rosen Diankov)と滝野一征により、2011年7月に設立されたベンチャー企業です。
世界最高のロボット動作計画OSS「OpenRAVE」の産業用ロボットへの応用展開
MUJIN創業者の出杏光 魯仙は、米国カーネギーメロン大学のロボティクス研究所にて、ロボット研究の世界的権威である金出武雄教授の元で博士号を取得した際に、ロボット動作と3次元環境の解析における再利用可能な適合性の高い計算エンジンであるOpenRAVE (Open Robotics Automation Virtual Environment )を開発しオープンソース・ソフトウェアとして公開してきました。
OpenRAVEはこれまで6年間の開発・運営を経て、世界で300人以上の技術者コミュニティで利用され、200種以上のロボットでの利用実績を有する世界最高のロボットの動作計画ソフトウェアとして普及しております。
MUJINでは、このOpenRAVEを産業用ロボット向けに応用し、産業用ロボットの動作計画並びに配置の最適化を実現することで、産業用ロボットのプログラミニグに関わるコストを大幅に削減しつつ、生産効率の向上の実現に貢献して行きます。
具体的には、ロボットを導入する顧客やロボットのシステムインテグレーター様が「MUJINコントローラ」の直観的なWEBインターフェース(随1)上でロボット動作のタスクと環境パラメーターを設定するだけで、干渉物への衝突を完璧に回避した最適軌道を瞬時に生成し、さらに従来では不可能であった数万候補(配置候補数x全軌道候補)の中から最適な配置を探索する事も短時間で自動生成します。これにより従来ティーチングにより行われていた産業用ロボットのプログラミングの時間とそれにかかるコストを大幅に削減し、システムの精度を大きく向上させる事ができるようになります。
MUJINコントローラの機能
MUJINコントローラの革新性的機能は主に次の3つです。
1. 全自動軌道生成(障害物、特異点の自動回避)
MUJINは障害物に対しては干渉チェックのみしか行わず、人の手による干渉回避が必要な従来のオフラインソフトとは一線を画す、全自動で障害物、特異点を回避しながら、スピード、角度、把持等の制約条件も満たす画期的な軌道生成システムを開発しました。
これによりマニュアルティーチングでは不可能であった複雑な動作を可能にすると同時にティーチング作業を大幅に短縮する事に成功しました。生成された軌道は各ロボットメーカー事のロボットプログラムに自動で変換されそのまま実機で使用できます。
今後はリアルタイムでコンベヤー上等の動的な物体をつかみにかかるアプリケーションや三次元センサーと連携してバラ積ワークをハンドリングするランダムピッキングアプリケーション等の新機能が随時追加される予定です。(随2、図3:自動車のシート組付けのシミュレーション事例)
2. 最適配置
ある決められた範囲の中でタスクを達成できるロボット配置はどこか?さらにその中で最も高い生産性を生み出せるのはどの配置でどのロボット動作か?
現場では数秒のタクトタイムの短縮が生産性を大きく左右するため、技術者は最適な配置&最適な軌道に近づけようと膨大な時間を費やします。
しかし、候補配置x候補軌道=数万候補 にも及ぶため、到底、人力では最適なものを探し当てる事は不可能でした。
MUJINは最適軌道の自動生成を並列化計算し、短時間で全探索する事を世界で初めて実現いたしました。障害物回避、特異点回避や他の制約条件を完璧に考慮した最適配置での最適軌道をお客様に提供します。(図4:ロボットの配置最適化のシミュレーション事例)
3. 複数ロボット(双腕ロボットに対応)
従来のシミュレーションソフトの機能のほとんどは単体のロボットのみを対象としており、複数のロボットの動きを協調させてプログラミングする事は不可能でした。複数のロボットを密に連携させて動かす場合、アーム同士の干渉など制約条件が多いため、非常にコストと時間がかかるプロセスとなっていました。
MUJINは複数台のロボットがお互いの干渉を回避し、且つ制約条件を守った上で最適なプログラミングを自動で行う画期的な機能を開発いたしました
これにより、一つの工程において複数台のロボットが働きかけることにより、効率UPが期待できるだけでなく、需要が増えつつある双腕ロボットによる組み立て等の複雑なタスクも簡単に生成できます。
複数アームにも対応できるこの高性能機能を活用して頂く事により、マニュアルのティーチングによるプログラミングでは、これまで不可能だったロボットの新しいアプリケーションの実現も可能となります。(図5・図6:双腕ロボットのシミュレーション事例)
今後の展開
MUJINでは、今回の調達資金により、「MUJINコントローラー」を始めとする産業用ロボット向けのソフトウェア製品の開発を進め、ロボットメーカー様やロボットシステムインテグレーター様と連携して、知能化・複雑化する産業用ロボットに対応していくことで、多様な産業分野のお客様に産業用ロボットの導入と利用拡大の実現に貢献して参ります。
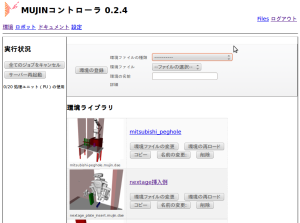
図1:MUJINコントローラーの設定画面
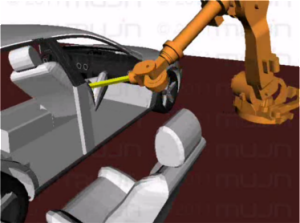
図2:シート組付けの複雑な動作のシミュレーション事例(1)

図3:シート組付けの複雑な動作のシミュレーション事例(2)
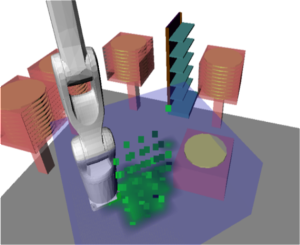
図4:ロボットの配置最適化のシミュレーション事例
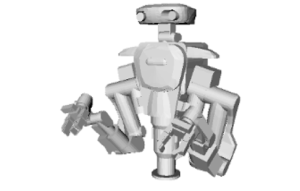
図5:双腕ロボットの動作シミュレーション
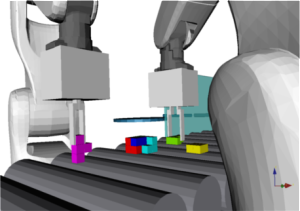
図6:双腕ロボットの動作シミュレーション事例
株式会社MUJINについて
株式会社MUJINはソフトウェアの力によって、世界中の産業用ロボットをより簡単により便利に使えるようにする事で、世界中の人々の生活と生産性を向上することをミッションとして2011年7月に設立された東京大学発ベンチャーです。当社ではロボットの動作計画エンジンとして世界で最も優れているOpenRAVEの産業用ロボット向けの応用ソフトウェアを開発販売しております。詳しくは、当社ホームページをご参照下さい。www.mujin.co.jp
http://mujin.co.jp
東京大学エッジキャピタル(UTEC)について
東京大学エッジキャピタル(UTEC)は東京大学の技術移転関連事業者として東京大学に認定された唯一のベンチャーキャピタルで、シード/アーリーステージの技術ベンチャーへの創業投資を行っております。UTECは総額150億円強の資金を運用しており、現在は2010年に組成された「UTEC2号投資事業有限責任組合」(70億円強)より新規投資を行っております。UTECは東京大学での研究成果やネットワーク、東京大学とシナジーのある国内外の大学、研究機関、企業のシーズから研究者や起業家と共同でベンチャーを創出し、イノベーションに基くグローバルなビジネス構築を通じて社会に貢献することをミッションとしています。
http://www.ut-ec.co.jp
以 上
お問い合わせ先
株式会社MUJIN
E-MAIL:info@mujin.co.jp
TEL:050-3682-7852
東京大学エッジキャピタル
E-MAIL:info@ut-ec.co.jp
TEL:03-5844-6671